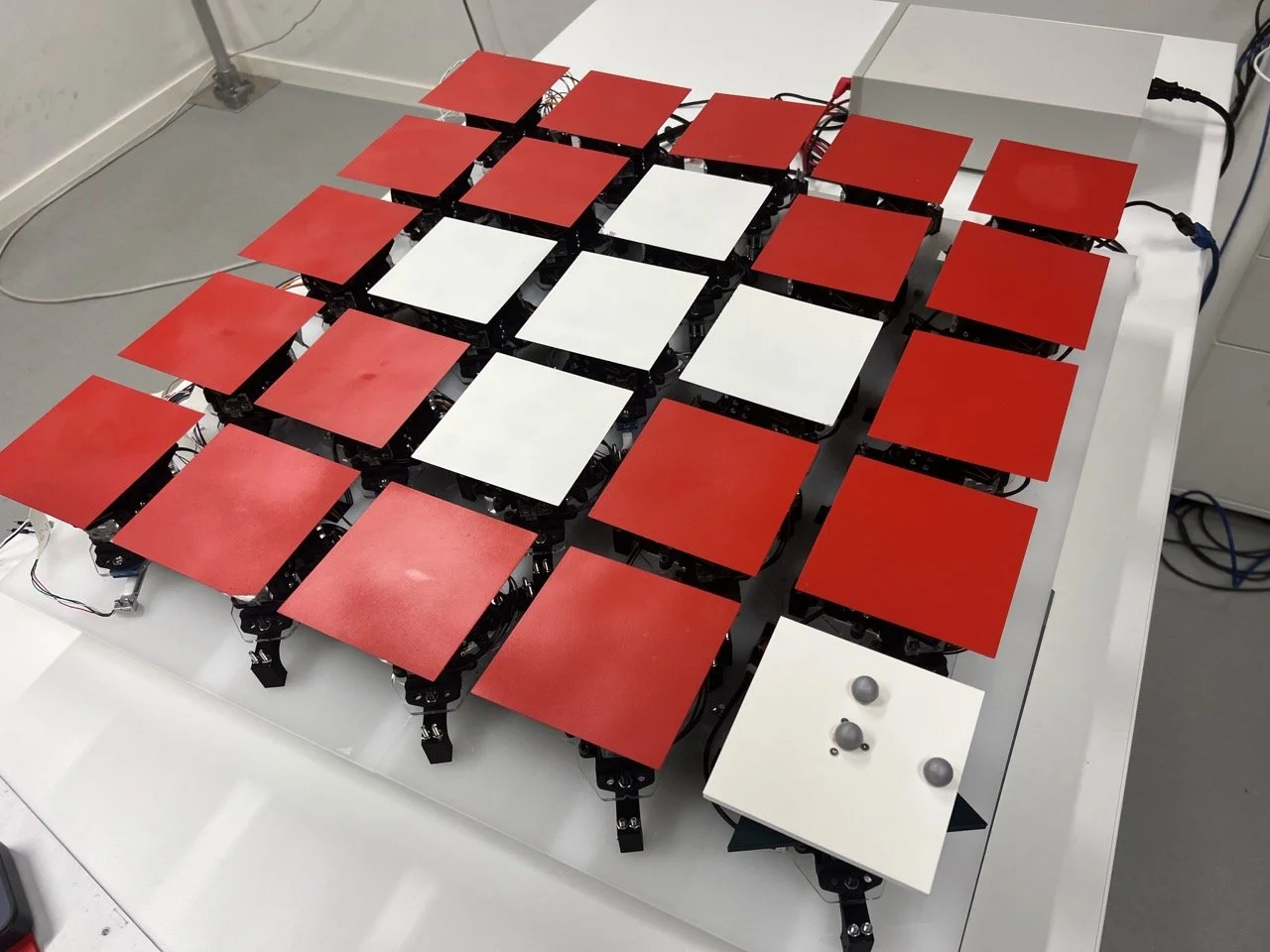
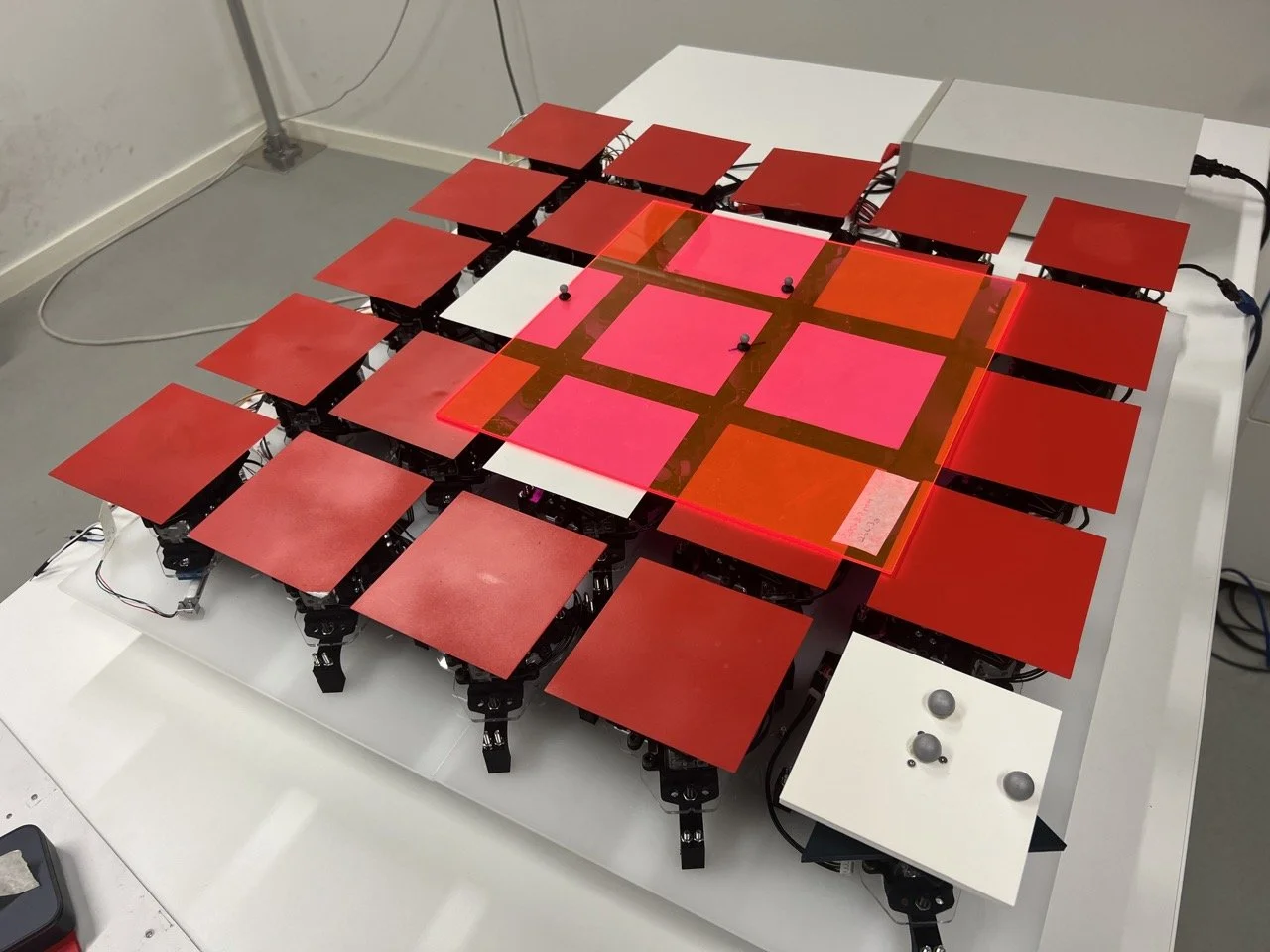
Multi-module Robotic Surface
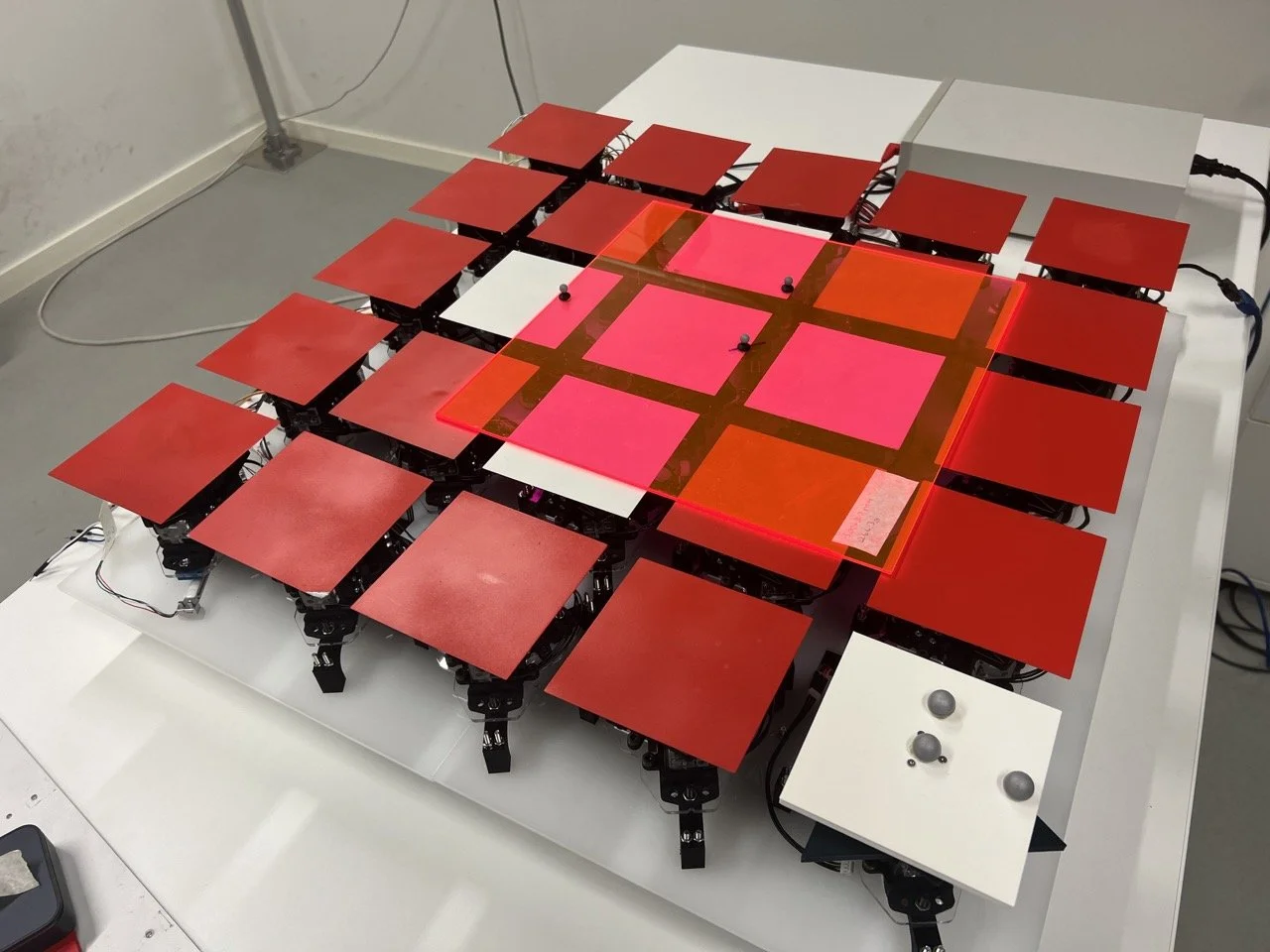
This project presents a novel method for manipulating objects of varying stiffness and sizes, from centimeters to meter scales, by employing a previously developed multi-module origami robotic surface, Oripixel, in conjunction with the collective CPG-based optimal control of modular origami robots.
Related Publications
1. Y. Jiang, S. Asmar, Z. Wang, S. Demirtas, J. Paik, “CPG-based Bulky Object Manipulation with Multi-module Origami Robot Surfaces,” Under prep, Oct. 2024.
Funding
MOZART: This work is supported by the European Union’s Horizon Europe Research and Innovation Programme under Grant No. 101069536.