Robotic Platform for Virtual Dynamic Environments
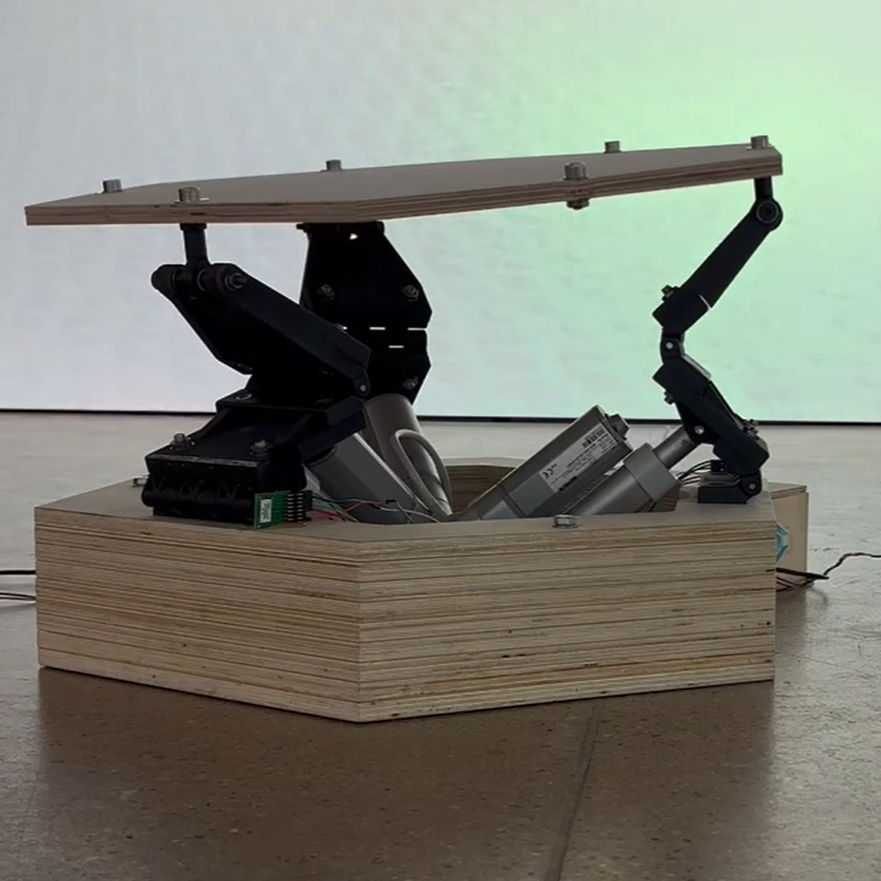
This project explores a robotic platform that enables full-body kinetic immersion in virtual environments, combining real-time physical interaction with virtual events. The system leverages modular robotic surfaces inspired by origami designs to provide dynamic, real-time feedback to users. The platform allows users to experience physical sensations such as forces, stiffness, roughness and motion.
One of the key applications demonstrated is a skiing simulator where users, interact with the virtual world using physical motions. The robotic platform adjusts its orientation to match forces, replicating the experience of skiing, including acceleration and motion dynamics, providing users with an immersive experience through full-body force feedback.
This technology introduce a new way for humans to interact with virtual environments, offering new possibilities for remote collaboration, teleoperation, and entertainment by providing a physically engaging experience that blurs the line between real and virtual worlds.
Related Publications
1. F. Zuliani, A. Bakir, N. Chennoufi, F. Bruno, J. Paik, “Kinetic Immersion in Virtual Dynamic Environment through Real-time Full-body Interaction,” Under prep, Oct. 2024.